Esistono anche dei micro robot che sono in grado di volare: i droni. I droni sono dei piccoli aerei o elicotteri (controllati o autonomi), che volando possono monitorare suolo, colture e bestiame.
Ne esistono di piccoli, i Robobees (Robot Ape), ma anche di grandi, copie di aerei in miniatura.
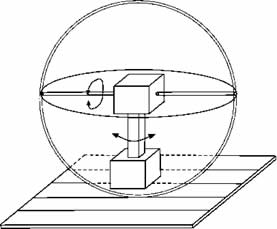
L’ape robot è prototipo realizzato da un gruppo di studio dell’Università di Harvard. Il tentativo è di creare un “Autonomous flying honey bee robot” (ape robot volante in modo autonomo), complesso macchinario delle dimensioni di un imenottero. I ricercatori collaborano con alcuni scienziati dell’Università di Sheffield e del Sussex per arrivare ad elaborare un modello di software che sia in grado di simulare l’attività cerebrale dell’ape. In questo modo il robot potrebbe diventare autonomo, prendendo, mentre vola di fiore in fiore, decisioni appropriate relativamente al contesto operativo.

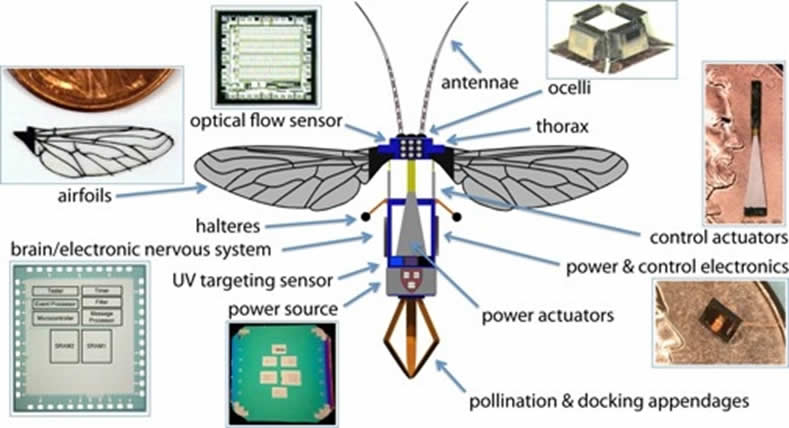 Schema di RoboBees
Schema di RoboBees
Il fine ultimo dell’utilizzo del flying honey bee robot dovrebbe essere principalmente quello di garantire l’impollinazione delle coltivazioni e quindi di ovviare al problema contingente della moria di api a causa dell’inquinamento.
I droni volanti di più grandi dimensioni hanno forme più simili a quelli di veri aerei o elicotteri e pesano pochi chili. Sono oggetti volanti guidati da terra che vengono spesso definiti con l’acronimo di APR (Areomobile a Pilotaggio Remoto).
La prima applicazione dei droni in agricoltura è sicuramente il monitoraggio dei campi. Gli APR possono aiutare a valutare dove i terreni sono più irrigati o malati, oltre a misurare l’altezza e l’estensione di colture e alberi.
I droni possono essere anche impiegati per monitorare animali al pascolo, avvistare eventuali capi scappati o addirittura per monitorare i pesci. Un nuovo sistema in via di definizione, infatti, permetterà di vedere dentro l’acqua e misurare la taglia di un banco di pesci.
Drone agricolo

I droni sono equipaggiati di sensori e videocamere di ultima generazione e sono in grado di fornire informazioni molto dettagliate sullo stato delle colture. Possono essere programmati per eseguire voli e rilievi in completa autonomia, senza il supporto di un pilota a terra essendo forniti di un pilota automatico munito di GPS. La videocamera è collegata al pilota automatico e le informazioni raccolte vengono trasferite a un software a terra che le rielabora e quindi fornisce una mappatura del terreno ispezionato.
I droni possono fornire una visione da qualche metro dal suolo fino ad un massimo di 120 m,forniscono immagini molto più economiche di quelle satellitari e hanno una risoluzione più grande. Inoltre, dato che i droni volano sotto le nuvole, è possibile raccogliere le immagini anche con il cielo coperto.
La visione dall’alto fornita dai droni permette di avere simultaneamente tre tipi diversi di visione:
-
mappature che evidenziano problematiche collegate all’irrigazione, variazioni sulla tipologia di suolo e la presenza di infestanti o funghi;
-
immagini multi spettrali, presi nello spettro visibile e infrarosso, che forniscono informazioni sullo stato delle coltivazioni compreso un eventuale stato di stress della pianta;
-
animazioni create in base alle riprese fatte a distanza di ore o giorni, a seconda della possibilità, che consentono una migliore gestione della coltura.
I droni in agricoltura permettono di ottimizzare l’impiego di risorse quali acqua e suolo, e fornire fertilizzanti e pesticidi solo dove e quando necessario.
Esistono droni agricoli per ogni di tipo di coltura e per tutte le aziende agricole. Attualmente funzionano meglio per le culture erbacee rispetto a quelle arboree.
Il drone è un ottimo alleato nella lotta agli infestanti.

Esempio di quadricottero unmanned
Nelle culture del mais nel mantovano i coltivatori hanno usato un quadricottero unmanned per spargere con precisione capsule con ovature di imenottero, un parassita che si nutre delle uova della piralide, altro parassita che affligge gravemente queste colture. L’operazione è stata rapida e micro-invasiva per l’ambiente e senza problematiche legate alle condizioni meteo.
torna al cap.1