

1.2. Casi pratici
Ladybird
In Autralia nell’azienda agricola di Ed Fagan, produttrice di cipolle, barbabietole e spinaci, è stato testato il robot agricolo Ladybird (Coccinella) ideato dall’Università di Sidney dove un gruppo di ricerca guidato dal professor Sukkarieh si dedica a ridefinire delle aree fondamentali della robotica, come la tecnologia sensoriale, materiali di sviluppo e meccanismi autonomi complessi.


Il robot Ladybird è adatto all’agricoltura su grandi superfici ed è alimentato ad energia solare. Il dispositivo possiede una serie di sensori che identificano il grado di sviluppo degli ortaggi e le specie infestanti, che siano vegetali o animali. Inoltre, il dispositivo possiede un braccio meccanico che ha il compito di rimuovere le erbacce oltre che permettere una potenziale raccolta autonoma.
Ladybird è stato progettato e costruito specificatamente per il settore degli ortaggi. Il robot è in grado di condurre autonomamente operazioni di sorveglianza, mappatura, classificazione e localizzazione per tutta una serie di ortaggi diversi. È in grado di percorrere autonomamente in lungo e in largo le file e di passare anche da una fila a quella successiva; il tutto raccogliendo dati. I sensori comprendono laser, videocamere e fotocamere iperspettrali.
I test futuri relativi a Ladybird comprenderanno un braccio robotico prensile, situato sotto il veicolo per il rilevamento o campionatura in vista di una raccolta automatizzata.
Progetto europeo CROPS
Il progetto europeo CROPS (Clever Robots for Crops – Robot Intelligenti per le Colture) è stato finanziato all’interno del 7° Programma Quadro, vede la partecipazione di quattordici partner provenienti da dieci nazioni diverse ed è coordinato dall’Università di Wageningen UR (Paesi Bassi).
Il progetto CROPS si focalizza sullo sviluppo di nuove tecniche per sensori, bracci robotici, pinze e intelligenze artificiali impiegabili in agricoltura.
Uno dei risultati ottenuti riguarda un robot in grado di raccogliere autonomamente ortaggi maturi.
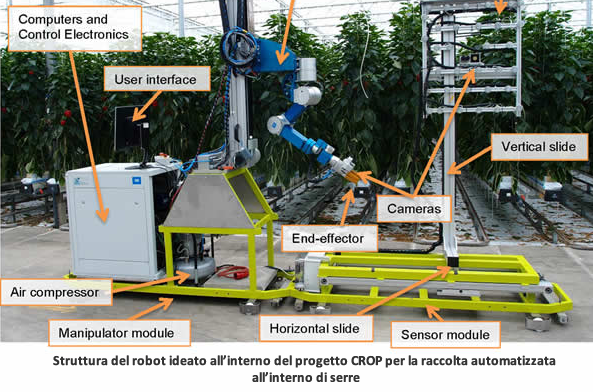
La base del robot consiste in una piattaforma semovente sulla quale sono montati un braccio robotico con un dispositivo all’estremità che permette la presa e il taglio dei frutti, un compressore per i pneumatici, un sistema di controllo elettronico, computer e sensori per la rilevazione della frutta e degli ostacoli. La localizzazione dei frutti maturi avviene in due fase differenti. Sulla "mano" robotica è stata integrata una telecamera 3D.
Il robot è in grado di muoversi grazie alla presenza di telecamere di tipo diverso. Infatti il robot possiede una telecamera a colori e una a tempo di volo (TOF-camera). Quest’ultima permette di stimare in tempo reale la distanza tra la telecamera e gli oggetti o la scena inquadrati. Tale stima è possibile in quanto viene misurato il tempo che occorre ad un impulso luminoso per percorrere il tragitto telecamera-oggetto-telecamera. Questo tragitto è chiamato tempo di volo.
Le immagini provenienti da entrambe le telecamere vengono integrate per fornire le indicazioni complete sul colore e posizione degli ortaggi. Se un ortaggio è giudicato maturo il robot gli posiziona il braccio di fronte, ricalcola la posizione del frutto grazie alle telecamere (una a colori e una a 3D) integrate nella mano robotica e lo raccoglie.

Il robot del progetto CROP è in grado di raccoglie i peperoni in serra in completa autonomia
Le sperimentazioni in una serra commerciale hanno dimostrato che il sistema può raccogliere i frutti maturi in completa autonomia.
